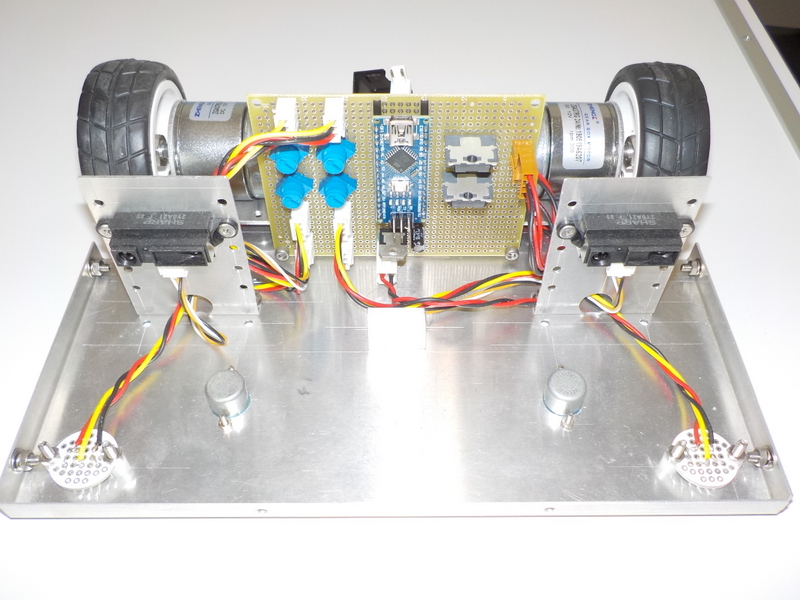

ArduinoマイコンとDCギヤードモーター2個、モーターハブ2個、ラジコン用タイヤ2個、ボールキャスター2個、フォトリフレクタを4個使って相撲ロボットを作りました。
測距センサ2個で、相手との距離や位置関係を判断し、DCギヤードモーターをコントロールして戦います。
まだプログラムが未完成なため、戦うことはできていませんが、とりあえず壁を避けて走ります。
制御回路には、Arduino nanoマイコン、3端子レギュレータ、モータードライバー2個、土俵を割らないようにするためのフォトリフレクタの感度調整用の半固定抵抗4個で構成されています。
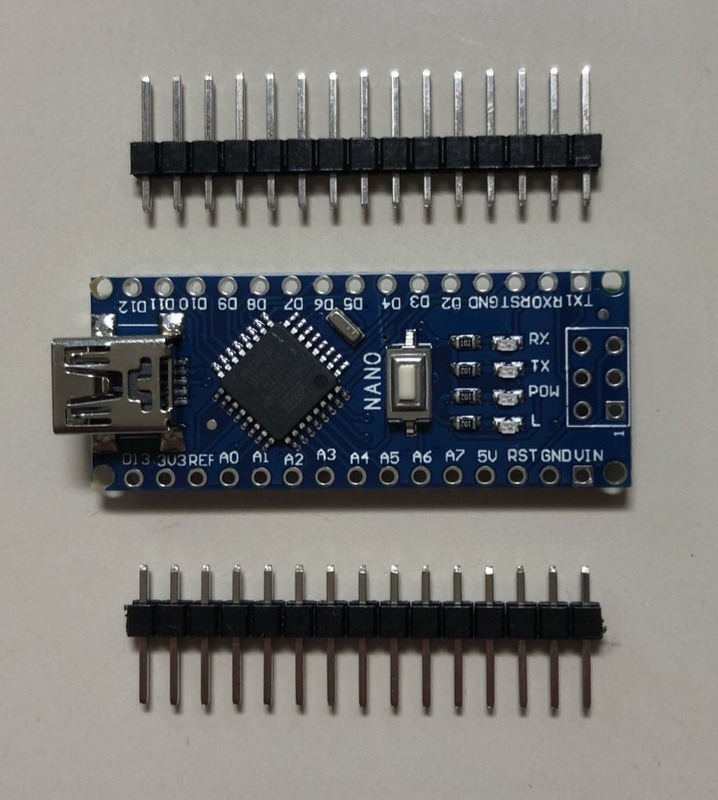
Arduino nanoマイコンボードは、ICチップの付いた基板にピンヘッダが付いており、ユニバーサル基板を使った回路基板にICのように載せられる便利なマイコンボードですが、設計が古いため左側のUSBコネクターがMini USBになっていますが、USBケーブルだけでパソコンと接続してプログラムを書き込むことができます。

このArduinoを中心に、他の必要部品を配置して配線した基板が上の写真です。ArduinoのUSBコネクターはプログラムの書き換えが基板に取り付けたまま可能なように、基板の外周に配置し、コネクターをふさぐように部品を配置してはいけません。
バッテリーを接続する電源コネクター(左下)は、その右側の3端子レギュレータによって12ボルトから5ボルトに下げられ、Arduinoマイコンの5V端子とフォトリフレクタ(白いコネクター(3ピン)に供給します。バッテリーのマイナス端子は、3端子レギュレータのGND、そしてArduinoのGNDに接続します。そのため、これらの回路はArduinoの5VとGNDの近くに配置します。
フォトリフレクタを接続する白い3ピンのコネクターと、土俵の白線を検出する感度調整用の半固定抵抗は、それぞれArduinoのA0~A3に接続しますので、その近くに配置します。
モータードライバーICは、ArduinoのD2~D5に接続しますので、その近くに配置し、2個のモーターを接続する右下の茶色のコネクターは、モータードライバーICの近くに配置します。
ArduinoのD0とD1は、パソコンとの通信に使って、プログラムを書き込んだり、データをパソコンに表示したりするのに使いますので、ここには何も接続しません。もしここにモータードライバーICとモーターを接続すれば、プログラムを書き込むたびにロボットがランダムに動いて暴れることになるはずです。
このように、回路から部品配置と配線を考えるときに、その部品が配置されるべき位置を慎重に考えてから固定すれば、配線が短く簡単になり、交差しないのでプリント基板を設計するときにも楽になります。ユニバーサル基板で組み立てるばあいは、あまり配線が短すぎるのも配線しにくいのですが、配線が交差しないようにしておけば、抵抗のリードを切った余りなどで直接接続できますので、作業効率からも見た目からもお勧めです。
プログラムを書き込む

Arduinoマイコンのプログラム(ソフトウェア)を開発するためのパソコンソフトはarduino.ccから無料でダウンロードでき(できれば寄付してください)、簡単に使えます。
このような点からも、学生の学習用や趣味などで使うにもArduinoマイコンは適しています。


コメント