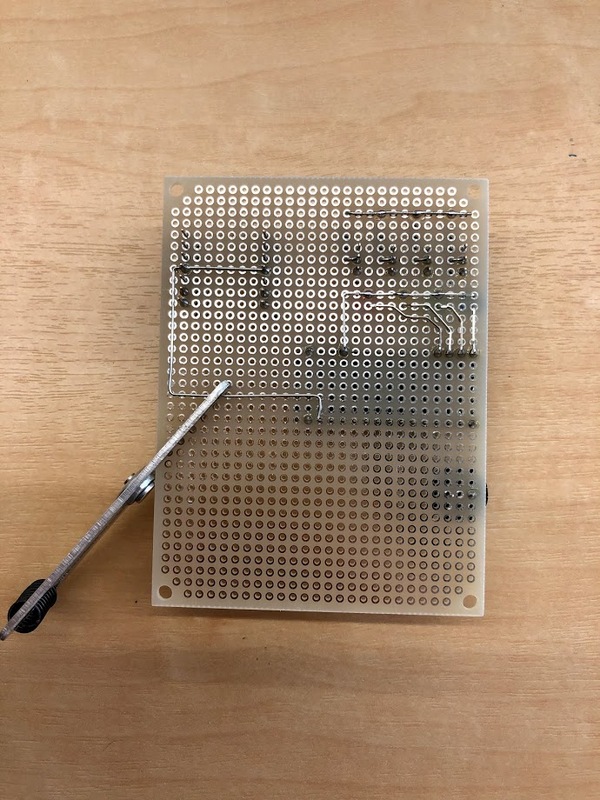
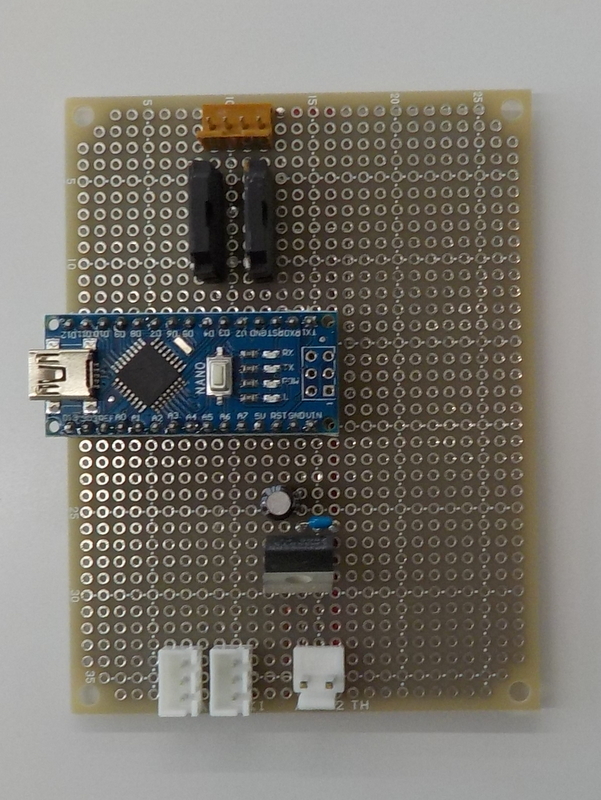
相撲ロボット制御基板の製作 未分類Arduinoマイクロコンピューターを使った制御基板 X Facebook はてブ Pocket LINE コピー 2020.09.162023.05.19 相撲ロボットもどきを制御するための回路基板を製作する手順について解説します。というか写真集です。 相撲ロボットもどき制御回路基板 部品の両端をはんだ付けで固定して部品の足を曲げて配線する 部品の足を曲げて数珠つなぎに倒してはんだ付け スズめっき線を使ってGNDを配線している途中 放熱クリップを使って上手に固定してはんだ付け スズめっき線の両端をはんだ付けしたところ 曲り角から数珠つなぎに配線すると段差がなく美しい 曲げる時は銅箔でショートしないように90°か45°に曲げる 45°に曲げて最後の接続点をはんだ付け GNDの配線が終わったところ トランジスタのGNDをつなげる トランジスタのGNDをつなげたところ スズめっき線と交差する配線はジュンフロン線の両端を2mmほど剥いてはんだ付け コネクタを付ける 完成した相撲ロボットもどき制御回路基板














 未分類
未分類

コメント