
1.メカトロニクスとは
メカトロニクスは機械工学を意味する「メカニカル」と電子工学を意味する「エレクトロニクス」を合わせた和製英語で、「機械の電子化」を意味します。
電子化することにより、高価で高精度を必要とする「カム」や「歯車」が必要なくなったり、タイミング調整や動作範囲の調整、角度調整などが簡単になったり、ロボットのように人間の代わりをさせる「自動化」も可能になります。


1.1 メカトロニクスの構成
メカトロニクスは電子回路を利用します。その利用方法は機能の一部を電子回路で置き換えたり、ロボットや自動機械のように判断や運転をコンピュータに任せる場合もあります。

ロボットや自動運転などでは、人間の代わりに状況を見ながら判断し、動かすために、人間の五感に相当する「センサ」、脳に相当する「コントローラ」、筋肉に相当する「アクチュエータ」を組み合わせます。

1.1.1 センサ
人間の五感に相当する機能です。物体の位置、圧力や温度や湿度などの物理的な量を電気信号に変換してコントローラに入力します。
近年では、「ぶつからない車」のようにカメラを搭載して画像を認識するタイプのセンサも増えてきました。





1.1.2 コントローラ
人間の脳に相当する機能です。大昔には電磁石とスイッチを組み合わせた「リレー」や、「トランジスタ回路」、「IC回路」などが使われていましたが、近年は、ほとんどの場合「マイクロ・コンピュータ」か、マイクロ・コンピュータを使った「プログラム・コントローラ」が使われます。

1.1.3 アクチュエータ
聞きなれない名称ですが、人間の筋肉に相当する機能です。基本的に電気信号を動きに変換します。
多く使われるのは、電磁石と鉄心、または、電磁石と永久磁石を組み合わせた「ソレノイド」と、「モータ」です。
ソレノイドは基本的に直線運動(直動といいます)で、モータは基本的に回転運動が得られますが、直線運動が得られる「リニア・モータ」も使われます。
他には、電圧を加えると変形して圧力が得られる「圧電セラミック」などを使った「圧電素子」や、二種類の金属を接合して電流を流すと発熱して膨張率の違いから反りが生じる「バイメタル」が使われることもあります。
2.アクチュエータの種類
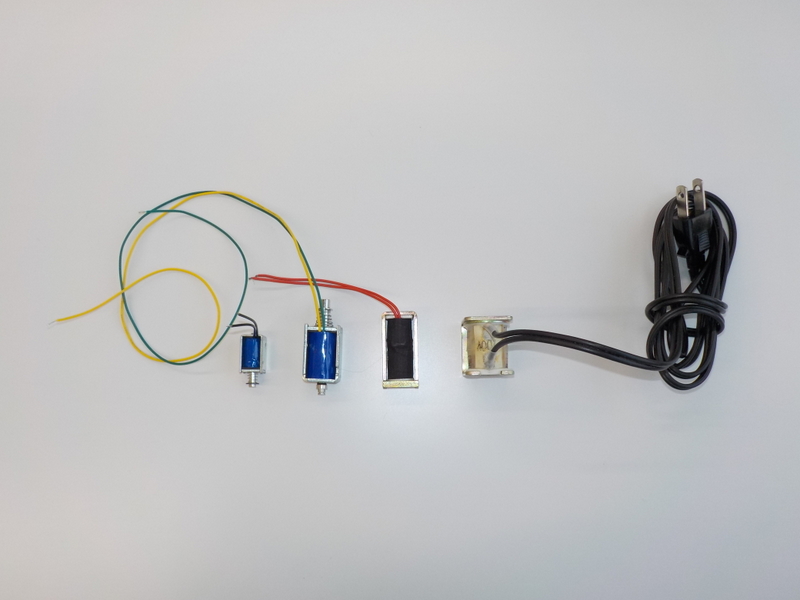
2.1 ソレノイド
ソレノイドは電磁石です。コイルに電流を流すと磁力が発生し、磁性体で作られたアーマチュアを吸引して、引き込み(プル動作)、あるいは、押し出し(プッシュ動作)します。
長時間使用すると、発熱や電力の問題が多く、連続運転には向きません。また作動音が大きく、衝撃も大きいなど欠点も多いのですが、比較的低価格なのと制御が簡単なので多く使われます。
2.2 モータ
モータは、電力を回転動力に変換する装置です。さまざまな大きさや構造のものがあり、アクチュエータの大多数を占めます。
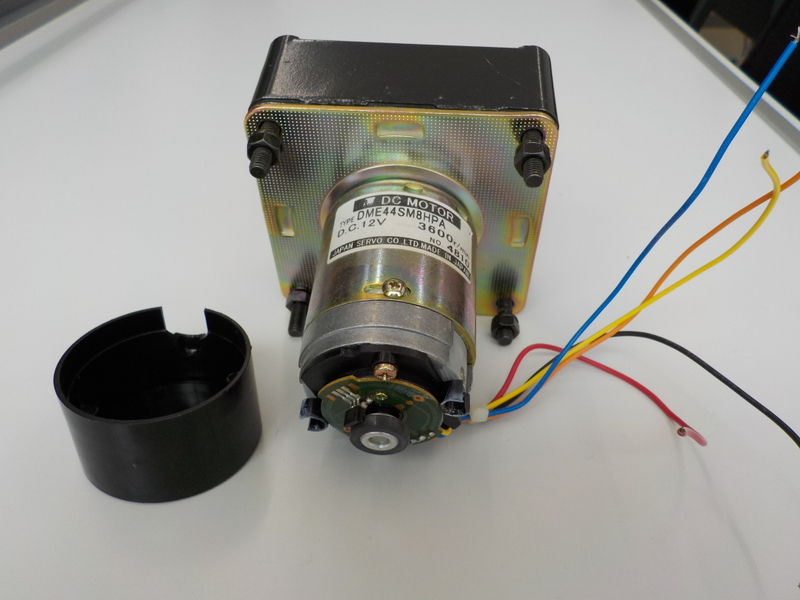
2.2.1 DCモータ
DC(直流)で回転するモータです。直流は電流の方向が一定なので、そのままでは回転しないため、基本的には回転に伴って電流の向きを変える「整流子」と「ブラシ」が必要になります。

整流子とブラシは、電気を通す金属で作られるため、回転による摩耗で削れ、電流が流れなくなったり、金属粉末でショートしたりしますので、定期的な清掃や交換が必要になります。
小型の連続運転しないDCモータでは、整流子やブラシは交換できるように作られておらず、寿命が来たらモータそのものを交換しなければなりません。自動車の「パワー・ウインドウ」や「電動ミラー」などがこれに相当しますが、基本的に連続で動かすものでないため、特に問題になることは多くありません。
それに対して、自動車のワイパーなどは雨が多いと連続運転しますので、故障が多く、あまり良くありません。私の車も大雨の中でワイパーが故障し、窓から頭を出して運転し、ズブ濡れになりながらガソリンスタンドに行き、ヒューズを交換してくれましたが、すぐに切れてしまい、困っているときに雨が止んだので翌日分解してみたらブラシが折れてショートしていました。
それから、整流子とブラシにより、電流の向きが変わる際に「スパーク」と呼ばれる火花が発生し、整流子やブラシを溶かしたり、電磁波が発生して他の電子機器や電子回路に影響を与えたりするので、近年では整流子とブラシの機能をセンサと電子回路で置き換えた「DCブラシレス・モータ」も多くなってきました。こちらもラジオを聞きながらワイパーを動かすと、スピーカーからブラシの火花がノイズになって聞こえるので、ワイパーを止め忘れることがありませんでした。
DCブラシレス・モータでは、寿命はモータの軸に使われているベアリングの寿命で決まり、長寿命、静音、ノイズレスなどの特徴がありますが、一般的に高価です。身近なところでは、パソコンなどの冷却ファンにDCブラシレス・モータが使われています。

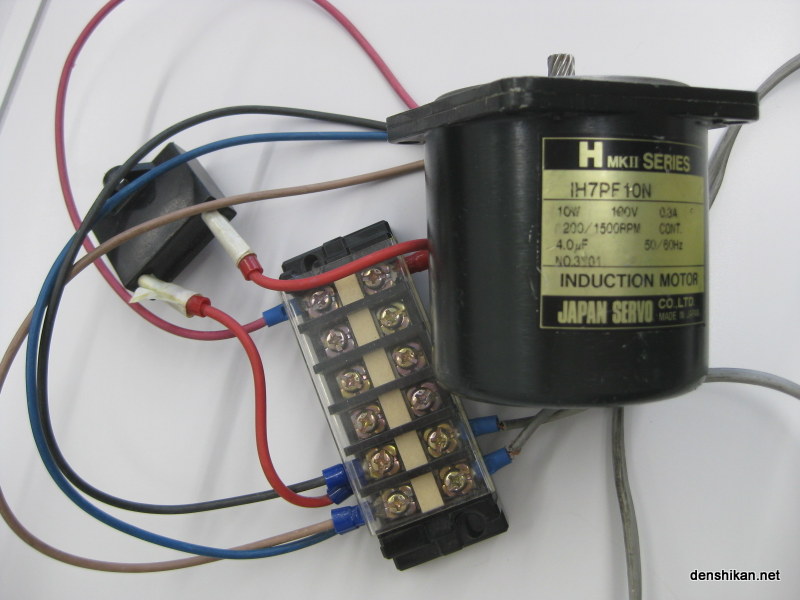
2.2.2 ACモータ
ACモータは交流で回転するモータです。交流は時間と共に電流の向きが変わるため、原理的にDCモータのように整流子とブラシを必要とせず、長寿命で音が静かですが、回転速度は電流の向きが変わる「周波数」で決まってしまい、基本的には回転速度を変えることができません。
また、従来は強力な永久磁石を作るのが難しく、回転子も固定子も電磁石で作られたために、結局DCモータと同じように整流子とブラシが必要になり、寿命が短くなったり、定期的な清掃や部品交換が必要になったりしていました。
最近では「ネオジム」などの「レア・アース」を使い、強力な「超電導電磁石」で永久磁石を作ることにより、小型で強力な永久磁石を作ることが可能になったのと、大電流を制御する半導体の進歩により、小型で強力で長寿命で、回転数を任意に変えられる「インバータ」と併用することにより「ACブラシレス・モータ」が多く使われるようになり、身近なところでは小型軽量で吸引力の強い「ダイソンの掃除機」や高級な洗濯機、電車のモータなどに使われています。

2.2.3 ステッピングモータ
DCモータとACモータは基本的に回るか止まるかで、回転速度を一定に保ったり、一定の角度や回転数だけ回転させたりするためには、「サーボ機構」などの機構と制御回路が必要になります。
ステッピング・モータは、電磁石(コイル)を複数配置することにより、電磁石に電流を流すと一定角度だけ回転するモータです。
身近なところでは、アナログ時計(針が回転する時計)で1秒1ステップで秒針を回転させたり、プリンタなどで印字ヘッドを移動させたり印刷用紙を送ったりするのに使われています。
しかし、本当に一定角度回転したかどうかはわからず、電池が消耗したり、負荷が大きかったりすると、実際には回転が行われない「脱調」が発生します。
ですから、時刻を標準電波で自動修正する電波時計などでは、電池を交換した際などに0時0分0秒の位置にセンサを付けておいて、その位置まで指針を早送りし、それから実際の時間まで早送りしたりして、指針を戻せば早い場合などは正しい表示になるまで長時間かかるなどの動作をすることになります。
逆に回転が電磁石と永久磁石の吸引と反発によって起こるため、負荷が大きくなったり、物や人が挟まった場合でも脱調が起こるだけで故障したりケガをしたりすることも少なく、安全に動かすことができます。
そのため、物や人に当たる可能性のあるエアコンの吹き出し口(ルーバ)やプリンタの紙送り、印字ヘッドの移動などに使われるのです。

2.3 圧電素子
電圧を加えると圧電セラミックなどの圧電素子が変形して作動するのが圧電素子です。圧電素子では変形の量が極めて少ないため、大きな動作には向いていませんが、小さく作ることが可能なため、手術用の機械やマイクロ・ロボットやインクジェットプリンタでインクを押し出す「印字ヘッド」の「ノズル」などに使われています。
2.4 空気圧
メカトロニクスは「空気圧」も良く使われます。空気圧は漏れても害は少なく、動きもソフトで故障も簡単に判別できたり、動作速度やパワーなどをアクチュエーターの近くで簡単に調整できるため、自動機械や食品などを扱う清潔さが必要とされる機械などに使われます。
ただし、動かすためには大きく重く騒音が酷い「エアーコンプレッサー」が必要になるため、工場や倉庫などで使われますが、事務所や可搬機器などにはまず使われません。詳しい説明は別の機会に譲りますが、空気圧を利用したアクチュエーターの「エアーシリンダー」の写真を下に示しておきます。

2.5 サーボモーター
サーボモーターは、コントローラー付きのモーターで、専用のコントローラー(ドライバー)により、簡単に位置制御や速度制御のできるモーターです。高価ですが、高精度な自動化が可能です。

下の写真のような「ラジコン用サーボモーター」もありますが、繰り返し精度が悪く、非常に壊れやすいため、おもちゃのロボットには使われますが、メカトロニクスで使われることは基本的にありません。

2.6 リニアアクチュエーター
リニアアクチュエーターはステッピングモーターと台形ネジを内蔵して直線運動できるアクチュエーターで、下の写真のもので最大40kgのものを最速380ミリメートル毎秒で動かすことができます。高価ですが本格的な自動機械を簡単に作ることができます。
3.センサの種類
人間の五感に相当する、物理的な量を電気信号に変換するのがセンサです。センサには、感知する物理的な量の種類、感知する距離、感知する物体の種類、センサの大きさ、センサの構造などで多くの種類があります。
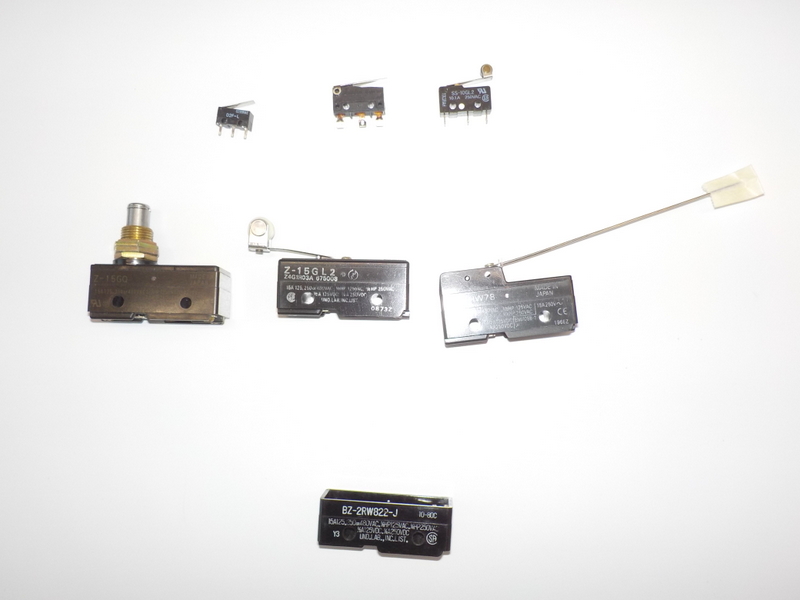
3.1 リミットスイッチ
作動限界(リミット)を感知するスイッチで、感知する物体の移動方向や材質などに合わせて多くの種類があります。構造が簡単なため安価で取り扱いも簡単なのですが、金属と金属を接触させたり押し付けたりして電流を流すため、モータの場合の整流子とブラシのように摩耗したり、火花で酸化して電気が通らなくなったり、溶接されてONになったままになったりして、寿命はあまり長くありません。
また、防水や防塵構造でないと、湿気や水分や薬品やガスなどによってONにならなくなったり、マイグレーションと呼ばれる電気分解、電気メッキ現象により、ONになりっぱなしになったりするので注意が必要です。
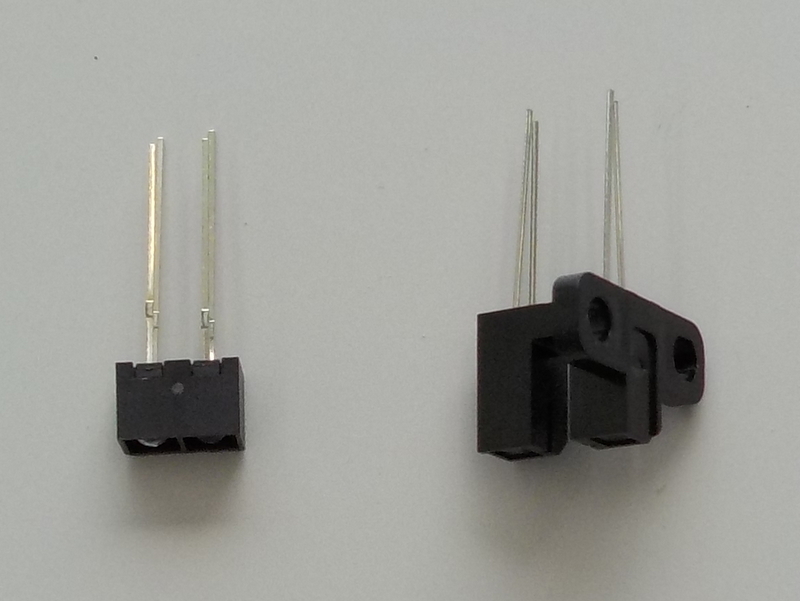
3.2 光電センサ
リミットスイッチの欠点を補うために発光ダイオード(LED)などの光源と光センサを組み合わせてスイッチの代わりをするように作られた「無接点センサ」です。
しかし、物体の検出に光を使うので、透明な物、あるいは、光を反射しない物では作動しなかったり、レンズなどが汚れると誤動作の原因になったりするので注意が必要です。
3.3 磁気センサ
磁気センサは磁力を感知するセンサで、通常は永久磁石と共に使われます。汚れや腐食性ガスによる誤動作がない上に、密閉型の防水性能を備えたものもあり、水や油を利用する機械などに良く使われます。従来はガラス管に磁性体金属のリードと不活性ガスを封入したリードスイッチが良く使われましたが、寿命があり、故障した際に作動しなくなったり、作動したままになったりするため、近年ではホールICと呼ばれる半導体磁気センサや、コイルと発振回路を使った誘導式センサが多くなりました。

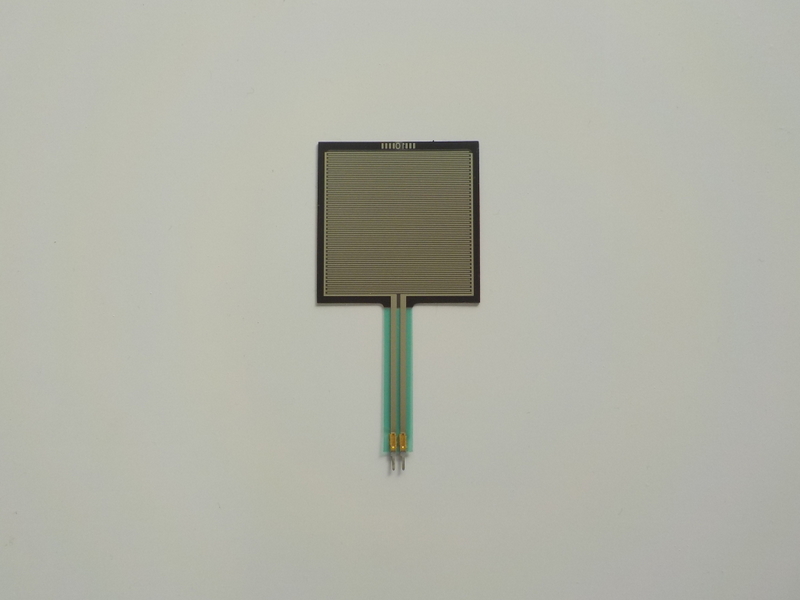
3.4 圧力センサ
圧力を電気信号に変換するセンサで、簡単なものは圧力スイッチなどや、細線の電気抵抗が折り曲げると収縮により微妙に変化することを利用した「ひずみゲージ」が使われていましたが、近年では半導体を使ったものや導電性プラスチックを使ったものが多くなりました。ガスや空気の圧力や重量を測ったりするのに使われます。
3.5 温度センサ

温度を電気信号に変換するセンサです。大昔には、熱膨張率の異なる金属を貼り合わせて温度により反りが変化する現象を利用した「サーモスタッド」が良く使われましたが、金属疲労による寿命や電気接点の放電による焼き付きなどで誤動作することが多く、次第に半導体の電気抵抗が温度により変化する現象を利用した「サーミスタ」に置き換えられ、近年では「温度センサIC」が使われることが多くなりました。
3.6 湿度センサ

湿度を電気信号に変換するセンサです。一般的にセラミック表面に電極をくし形に配置したセンサの静電容量(コンデンサ)が湿度により変化することを利用したものが使われますが、経年変化により電極が電気分解されたり、セラミック表面が汚れたりして、誤差が大きくなる性質があり、あまり精度が高いとは言えません。
3.7 焦電センサ(しょうでんセンサ)
焦電セラミックと呼ばれる赤外線が当たると電圧が発生するものを利用したセンサで、非接触で対象物の温度を測定できます。通常の金属が溶けてしまうような高温も測定できますし、人体が発生する赤外線を効率的に変換する「人感センサ」も最近の家電製品に多く使われるようになりました。

3.8 ガス・センサ
特に可燃性のガスを金網に包まれたヒータで加熱して温度変化により検出するセンサです。原理的に消費電力が大きく、風が当たったりすると誤動作する可能性がありますが、ガス漏れ警報器などに多く使われています。
また、放射性物質が可燃性のガスを電離させイオン化する原理を利用したセンサもあり、以前は火災報知器などに使われていましたが、福島第一原発の事故以来、放射性物質に対する嫌悪感から使われることが少なくなりました。
3.9 放射線センサ
放射線を電気信号に変換するセンサで、従来はガラス管の中に電極と不活性ガスを封入して、放射性が当たると電離作用により電流が流れる「ガイガーミュラー管」が良く使われましたが、大型になりやすいのと、壊れやすい、高電圧を必要とするなどの理由により、近年では半導体を使った放射線センサが多くなりました。

遮光したフォト・トランジスタに放射性が当たると電流が流れる原理を応用したもので、小型軽量化、低消費電力が可能で、一時期スマートホンに内蔵されたりしました。
4.コントローラ
コントローラは「制御装置」とも呼ばれ、機械などを制御(コントロール)するためのものです。良く聞く「リモコン」は「リモート・コントローラ」の略で、直訳すると「遠隔制御装置」となります。
大昔にはコントローラは、電磁石でスイッチを切り替える「リレー」が使われていましたが、トランジスタの発明により、寿命が半永久的で故障が少なく、低消費電力で作動音のしない半導体が使われるようになり、それが集積回路(IC)になり、コンピュータをIC化した「マイクロ・コンピュータ」(マイコン)が使われるようになり、マイコンの性能も格段に向上したため、近年では人工知能(AI)による自動車の自動運転までもが可能になるところまで来ています。
すでに新交通システム(ゆりかもめや日暮里舎人ライナー)などでは、マイコンによる無人運転が実現されているように、産業用機械や工作機械なども自動運転が一般的になって来ました。
また、機械業界ではマイコンを組み込んで簡単に使えるようにした「シーケンサ」あるいは「プログラム・コントローラ」あるいは「プログラム・ロジック・コントローラ」(PLC)と呼ばれる制御装置が多く使われます。
4.1 リレー
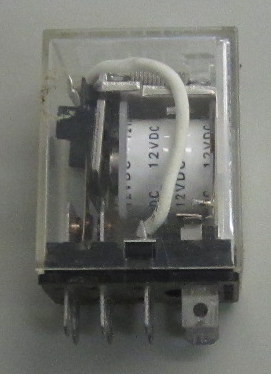
さきほど説明したように、電磁石でスイッチを切り替える部品を組み合わせ、デジタル回路の基本要素のAND,OR,NOT回路を作り、それを組み合わせてデジタル制御するためのものですが、高価で大型になり寿命も短く、配線が大変で改造や複製が面倒などの理由により、よほど簡単な制御回路以外には使われなくなりました。
ただし、プログラム・コントローラは、直接モータなどの大電力や高電圧で動く機器を制御できないため、プログラム・コントローラでリレーを動かし、リレーの接点でモータなどを動かす中継器(リレー)として使われることは現在でも多くありますが、これも寿命が半永久的で作動音のしない半導体リレー(SSR)に急速に置き換えられています。
4.2 トランジスタ回路
トランジスタは寿命が半永久的で低消費電力で安価なので、リレーを使った制御回路はトランジスタ回路に置き換えられ、さらには集積回路(IC)に置き換えられ、プログラムで簡単に動きを変えたり量産したりすることが容易なマイクロ・コンピュータ(マイコン)に置き換えられ、次第に使われなくなりましたが、マイコンは大電力や高電圧を扱うモータなどの動力を直接制御できないため、リレーと同じように制御回路の最終段で使われ続けています。
4.3 IC回路
トランジスタやダイオードなどの半導体素子と抵抗などの受動素子を小さなシリコン単結晶上に作り、パッケージに封入した集積回路で、マイコンが普及するまでは多く使われましたが、マイコンの普及によってプログラムで簡単に動作を変えたり、運転履歴を記憶したり、自動運転が可能になるマイコンに置き換えられ、近年では超高速処理が必要な場合以外は使われなくなりました。ただしマイコンも集積回路(IC)ですから、現在でも使われていると言えなくもありません。

4.4 マイコン
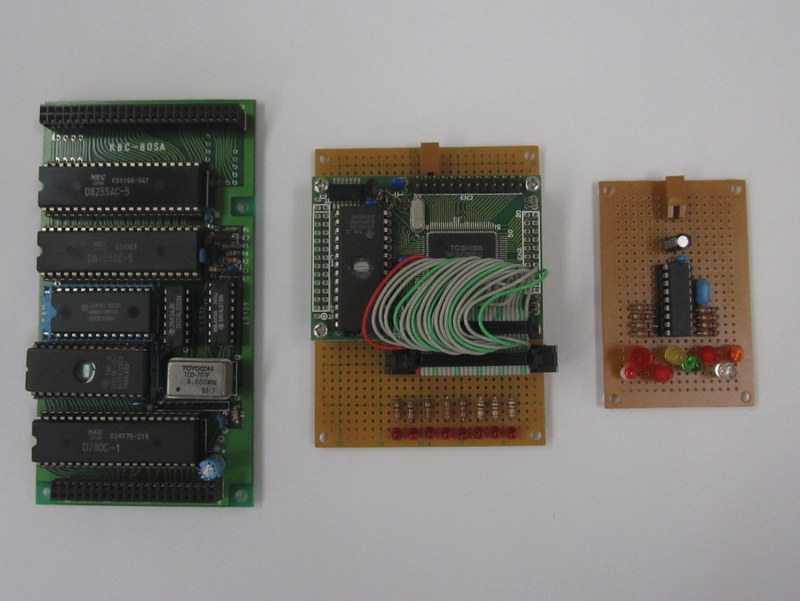
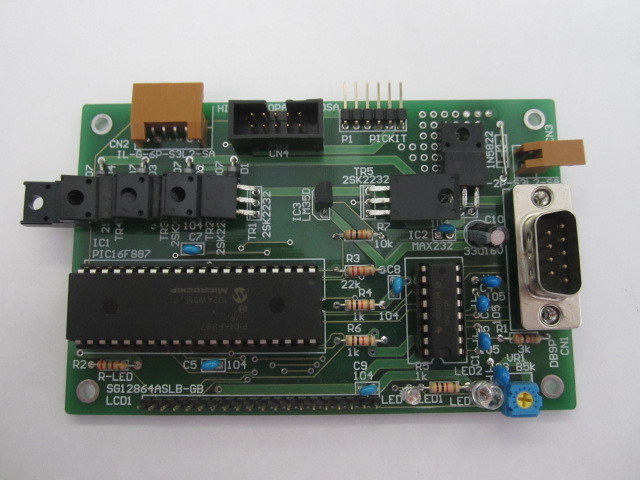
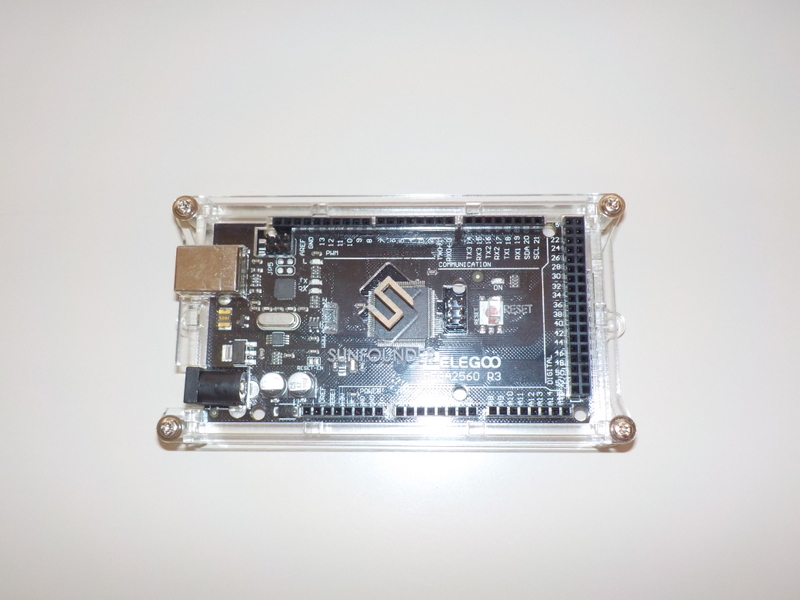
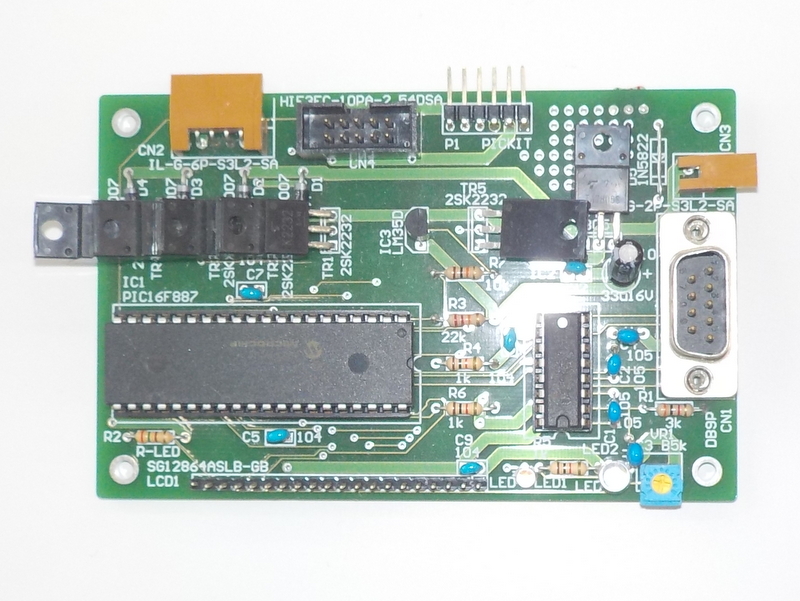
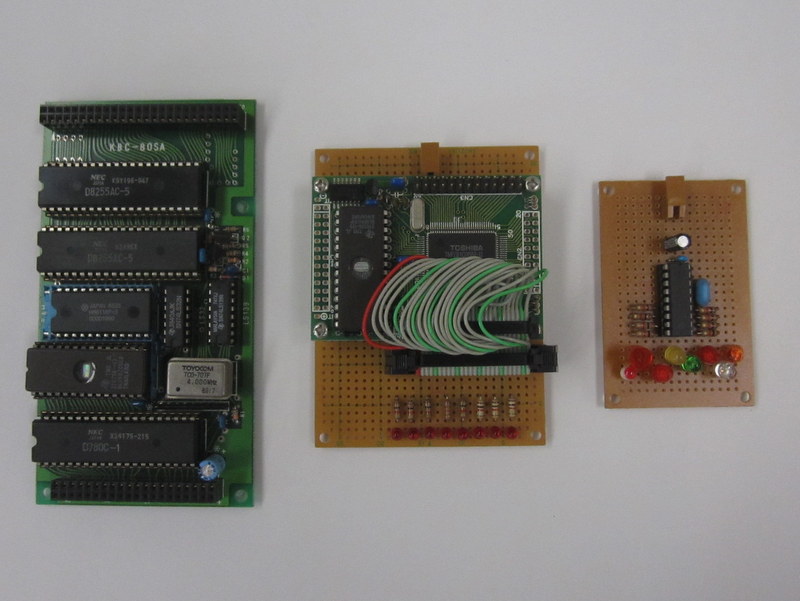
集積回路(IC)に、コンピュータに必要な中央演算回路(CPU)、メモリー(ROMやRAM)、入出力(I/O)を入れたものです。近年では性能が飛躍的に向上し、10年前のスーパー・コンピュータ(スパコン)に匹敵するようなものも作られ、自動車の自動運転や機械の無人運転などに活用されています。
マイコン基板の例
真空管の例(現在ほとんど使われない)

5.電子部品
最初に説明したように、電気が持つエネルギーを利用するのが「電気回路」で、電気が持つ性質を利用して何かをするのが「電子回路」ですが、「電子部品」とは「電子回路」で使われる部品のことで、一般的に「電気部品」よりも小型のものが多いです。
電子部品には、電気の働きかけで作用する「受動部品」と自分から働きかける「能動部品」がありますが、抵抗器、コンデンサ、コイルなどが受動部品で、トランジスタ、ダイオード、ICなどが能動部品になります。
5.1 抵抗
電流を制限するのに使われます。発光ダイオードなどの半導体は電流を制限しないと発熱で壊れてしまいますし、電流を制限して遅延回路や増幅回路などに使います。
当然に抵抗器に電流を流すと制限された電力は発熱となりますので、抵抗器はどれだけの発熱(電力)に耐えられるかと、制限する度合いの「抵抗値」、温度変化などによる誤差、周波数特性などの違いにより種類があります。

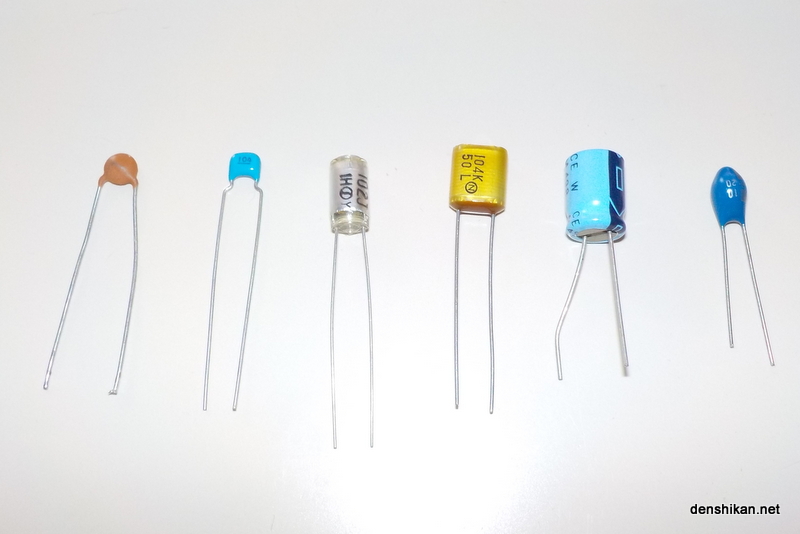
5.2 コンデンサ
電気を一時的に蓄える部品ですが、抵抗と組み合わせることにより遅延回路を作ったり、交流だけを通して交流増幅回路を作ったりするのにも使われます。
コンデンサも構造により特性が異なり、大容量だが特性の悪い「電解コンデンサ」、高周波特性は良いが容量が小さく信号ひずみの大きい「セラミックコンデンサ」、高周波特性は悪いが信号ひずみの小さい「フイルムコンデンサ」などの多くの種類があります。
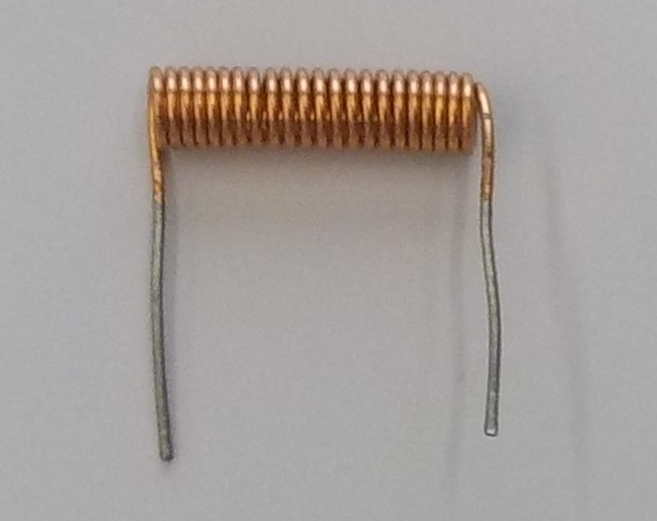
5.3 コイル
コイルは鉄心または空芯にエナメル線やポリウレタン線などの絶縁銅線を巻いたもので、電流と磁気の相互作用により電流を安定させたり、交流の位相をずらしたり、発電したりしますが、メカトロニクスの場合は電磁石により物を動かすアクチュエータとしての利用が多いです。電子回路においてもコイルは大型になり、値段が高く、発熱が多く、精度が悪く、磁気による影響を受けやすいなどの理由で可能な限り使わないで済むように設計されることが多いです。
しかし、高周波回路や変圧器(トランス)などでは、コイルにかわる安全で性能の良い部品がないため、現在でも使われています。
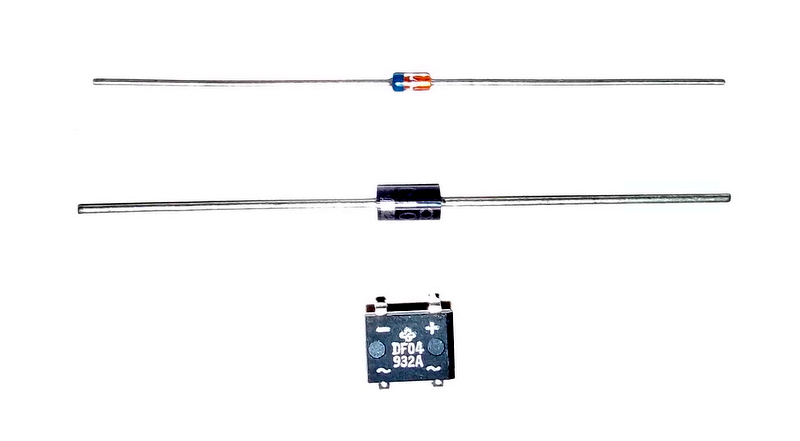
5.4 ダイオード
電流を一方向にしか流さない半導体で、交流を直流に変換する整流器やデジタル回路のAND回路やOR回路を実現するのに、またモータやリレーがOFFになる時に生じる逆起電力を吸収してトランジスタが壊れるのを防止するのに使われるほか、特殊用途の定電圧ダイオード、定電流ダイオード、可変容量ダイオード、発光ダイオードなどがあります。
5.5 トランジスタ
トランジスタとはトランス・レジスタの略で、抵抗値を変換する半導体素子という意味です。増幅回路に使われますが、トランジスタにより電力が増えるわけではなく、入力信号によってトランジスタの出力抵抗が変化し、そこに電源から電流を流すことにより、結果的に電流が増えたように見えるだけで、増やしているわけではありません。
どちらかと言うと、小さな力で大量の水の流れる量を変える水門のようなものと言えるでしょう。
トランジスタには、その原理による違いと極性(電流が流れる向き)の違い、使える周波数の違い、扱える電圧や電流の違い、増幅率(さきほど説明したように増幅ではなく伝搬率)などにより色々な種類があります。
近年では単体で使われることは多くなく、大電流や高電圧を扱う回路で使われるだけのことが多いです。
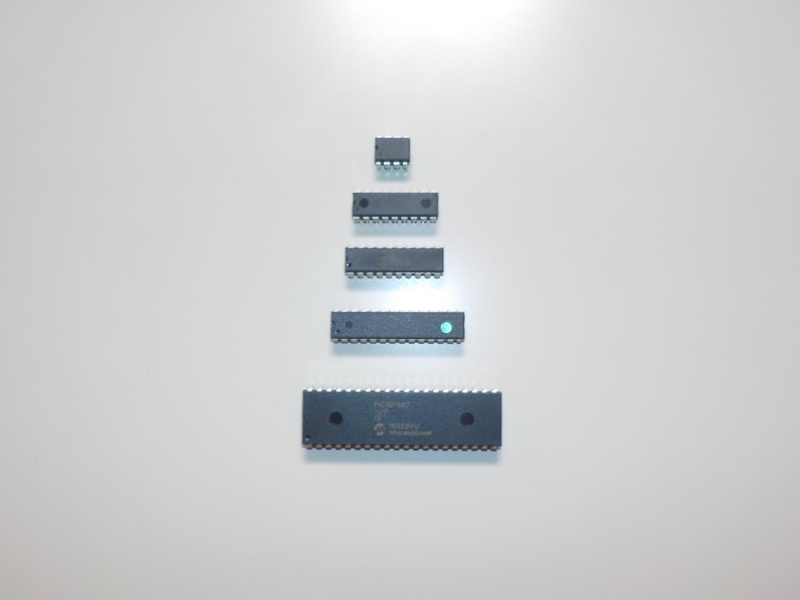
5.6 IC(集積回路)
トランジスタやダイオードや抵抗器などをシリコン単結晶の上に写真技術と印刷技術を利用して作った回路で、超小型で大量生産が容易なため同じ性能の回路を安く大量に作ることが可能です。逆に言うと少量生産では多額の費用がかかるため、良く使われる汎用回路のものが多く市販されています。
もともとはアメリカの人類が月を往復するアポロ計画で、コンピュータを小型軽量化する必要性から開発されたもので、当時は小さい電子部品を小さい基板に実装してパッケージ化する「ハイブリッドIC」でしたが、半導体技術の進歩によって、純度の極めて高い(少なくてもテンナインすなわち99.99999999%)シリコン単結晶を輪切りにした薄い板(シリコン・ウエハー)に写真技術と印刷技術で大量に同じ回路を作ることが可能になり(モノシリックIC)、超小型化、高集積化、低価格化が実現しました。
シリコン・ウエハーは直径10インチの物が1枚百万円程度することから、回路を小さくして1枚のシリコン・ウエハーに多くの集積回路を作れば単価は安くなりますし、同じ大きさならばより多くの回路を集積できます。
近年では写真技術で作る際に光の波長が問題になり、フィルムに光を当てて露光するのに紫外線からX線のような波長の短いものが使われるようになってきました。ただしX線はフィルムの黒い部分も通過してしまうため、写真技術が使えず、線を一本一本走査して描いたり、遮光するフォト・マスクに金属板を使ったりしなくてはならず、まだまだ高価です。
5.7 マイコン
集積回路技術の進歩により、コンピュータを集積回路で作ることが可能になり、その結果、小型軽量化と大量生産による低価格化が実現されました。「マイクロ・コンピュータ」の「マイクロ」とは「超小型」の意味ですが、性能が劣るのは昔の話で近年では20年前のスーパー・コンピュータの性能を遥かに超え、10年前のスーパー・コンピュータに匹敵するような性能のものもあります。
また処理速度を重視しない場合は、従来は別々に必要になるI/O,ROM,RAMなども1つのICに入れてしまった「ワンチップ・マイコン」も作られ、非常に手軽に使えるようになりました。

6.基板組立
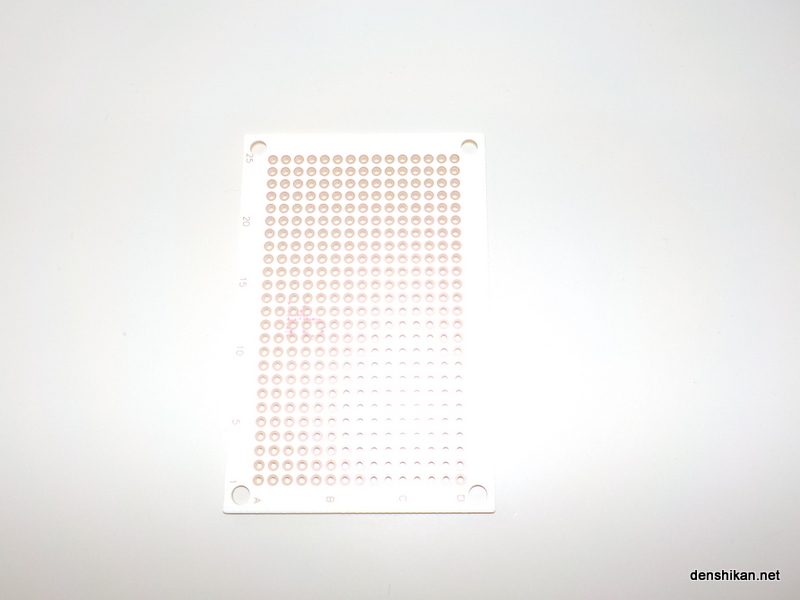
近年では、電子回路の組み立てはプリント基板(JIS規格ではプリント配線板という)を使うのが一般的です。ただし、プリント基板は1枚作るにも基板設計(アートワーク、露光フィルム、シルク印刷用製版などが必要になり、簡単なものでも初期費用が数万円、パソコンのマザーボードだと数千万円の費用が必要になりますので、試作をする時にはユニバーサル基板(穴あき基板ともいう)を使って製作することになります。
以下にプリント基板の材質による違い、組立方法について説明します。
6.1 基板の種類
プリント基板は絶縁体の基板に銅箔を接着剤で貼り付けたもの(銅貼積層板)にドリルで穴をあけ、銅箔の不要な部分を感光材によりフィルムから露光(焼き付け)して現像・定着(ここまで写真技術)し、銅箔の不要部分をエッチング液(塩化第二鉄)で溶かしてから感光材を取り除き、メッキ処理して外形を整えて作ります。
また、配線の複雑さにより、片面だけで配線する片面基板、両面で配線する両面基板、配線を裏表自在に行ったり来たりして配線する両面スルーホール基板(基板の表と裏の配線を穴の中までメッキするスルーホールめっきで繋げたもの)、両面基板を何層にも重ねた多層基板があります。
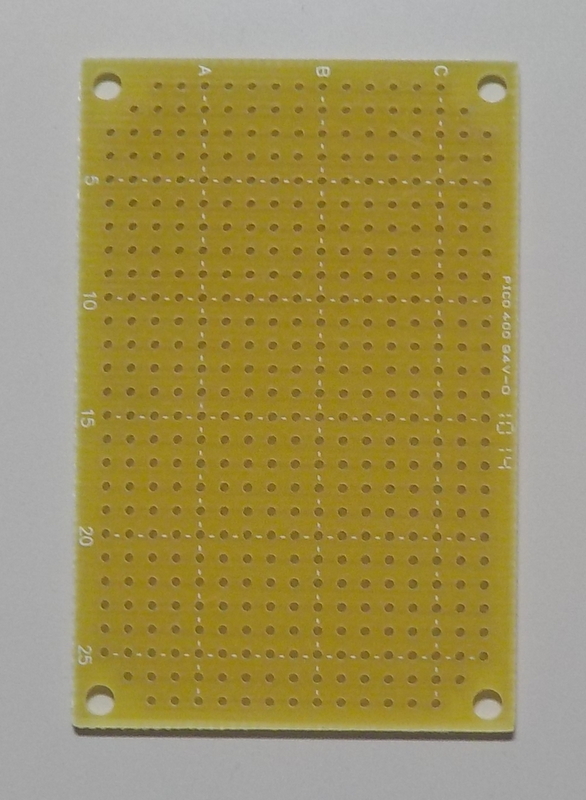
ユニバーサル基板は、どのような回路にも使えるように、配線部分をなくし、部品をはんだ付けする部分だけに銅箔を残したものです。
部品を片面だけに付けられるもの、両面に付けられるもの、両面スルーホールの3種類があります。
スルーホールでない片面基板または両面基板は銅箔は接着剤だけで固定されているため、はんだごてを当てすぎたり、はんだ付けした後に部品の足に力がかかったりすると銅箔が剥がれやすく、故障の原因になりますが、スルーホール基板は両面の銅箔がメッキで繋がっているため、信頼性が高く安定性も高いです。ただし、間違えてはんだ付けしたり、部品が壊れたりして交換する時は穴の中まで毛細管現象でハンダが吸い込まれて塞がってしまうため、部品を取るのが不可能に近くなります。部品を交換したり間違えたりする危険性がなければ両面スルーホールをお勧めしますが、そうでない場合は片面基板だと修正は何とかなります。
また、ユニバーサル基板の穴の間隔(ピッチといいます)は、IC回路の試作に便利な2.54mmピッチ(1/10インチ)が多いですが、2mmピッチや4mmピッチ、5mmピッチや1.27mmピッチ(ハーフピッチともいいます)も売られているので、注意が必要です。
以下にプリント基板の材質による違いを説明します。
6.1.1 紙フェノール

紙にフェノール樹脂と呼ばれる合成樹脂を染み込ませたものです。フェノール樹脂は耐熱温度が高く、絶縁性の良い材質ですが、割れやすく、反りやすく、独特の匂いがするため、精密回路や食品関係の基板には向きません。
6.1.2 紙エポキシ
紙にエポキシ樹脂と呼ばれる合成樹脂を染み込ませたものです。色が薄く、熱にも強いですが、強度が低く、反りやすいですが安価なので、電卓やリモコンなどの反りがあまり問題にならない小型の基板に使われます。
6.1.3 ガラス・エポキシ
ガラス繊維にエポキシ樹脂を染み込ませたものです。熱や化学薬品に強く、反ったり割れたりすることはまずありませんので、パソコンのマザーボードやデジタル・テレビなどの精密なものや大型の基板に使われます。
6.2 部品の固定
ユニバーサル基板を使って回路を組み立てる場合は、まず部品配置を決めますが、配線が出来るだけ短く、配線の重なりが少なくなるように部品を配置します。とは言っても同種の部品の向きがバラバラだと間違えたり見栄えが悪くなったりしますので、可能な限り部品の向きは揃えたほうが良いです。
部品を固定する際に、全部のピンやリードを先にはんだ付けしてしまうと、特に両面スルーホール基板の場合は絶対にと言っていいほど取れなくなりますので、まず両端の2か所または対角の2か所だけをはんだ付けして固定し、後から必要に応じて残りをはんだ付けすると、間違えたり部品が傾いたりしていた場合に修正が楽になります。
6.3 グラウンド(GND)の配線
グラウンドとは直訳すると地面のことをいいます。ビルディングなどでは地盤や基礎がしっかりしていなていと、傾いたり倒れたりしますが、電子回路でもグラウンドがしっかりしていないと、誤動作したり場合によっては壊れたりすることもあります。
電子回路の電源は上水道、グラウンドは下水道に例えられますが、上水道が不十分だと水漏れしたり、水圧が低くなって不便だったり、シャワーなどの洗浄性能が得られなくなったりしますが、下水道が不十分だと床が水浸しになったり、溺れて取り返しがつかなくなったりしますよね?
それと同じで、電子回路ではグラウンドは一番重要ですから、太い電線で、継ぎ目もしっかりはんだ付けする必要があります。そのため、グラウンドは最優先で出来るだけ最短距離で配線します。
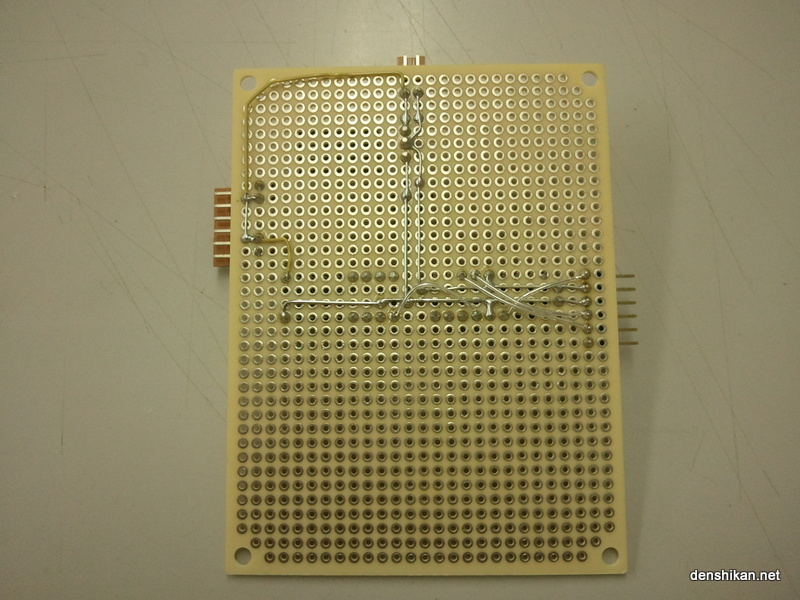
グラウンドの配線の際には、電流にもよりますが直径0.8mmないしは1mmのすずメッキ銅線を使うのが理想的です。電子回路の場合、グラウンドや電源は多くの配線が接続されますので、普通のビニール線を使うと1か所に2本以上の電線をはんだ付けしなくてはならず、面倒なばかりか2本目を付けようとしてハンダごてを当てると1本目が取れたりして大変になります。また、配線チェックの時も見にくくなりますので、できるだけ裸線で直線的に配線します。
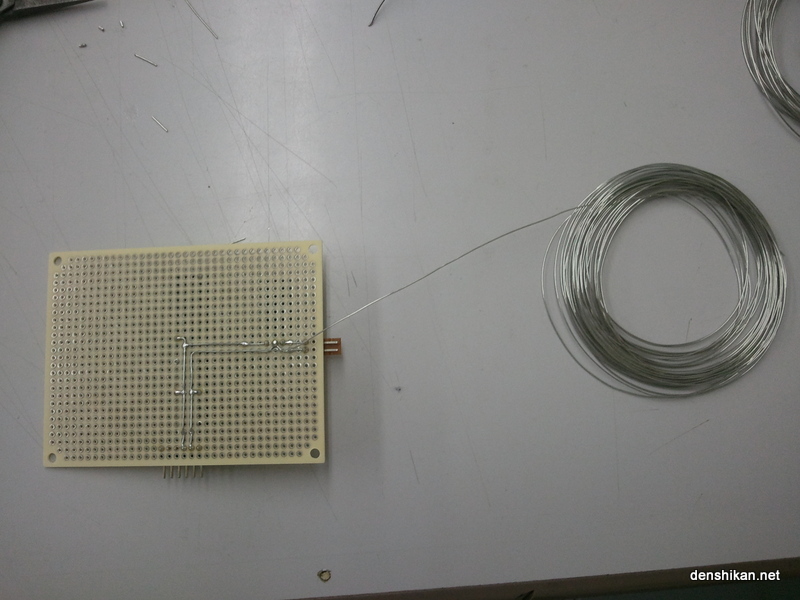
すずメッキ線によるグラウンド(GND)の配線
6.4 電源(VCC)の配線
電子回路においては、電源も多くの回路に接続しなくてはなりません。そして電線が細いと十分な電流を供給できずに誤動作を起こしたり性能を発揮できなかったりしますので、電流にもよりますが直径0.5mm程度のすずメッキ線を使うのが良いでしょう。その場合にグラウンドと同じ太さのすずメッキ線を使ってしまうと、電源とグラウンドの見分けが付かなくなり、チェックが大変で、しかも電源とグラウンドの混在は、電源ショートとなり、最悪の場合、電源装置が壊れたり、電池が破裂したり泡を吹いたり、部品が焼けたりしますので、容易に見分けが付くのが理想です。チェックの時も電源とグラウンドの接触がないかどうかを重点的にチェックするようにします。もちろんグラウンドと交差することは論外です。
6.5 その他の信号線の配線
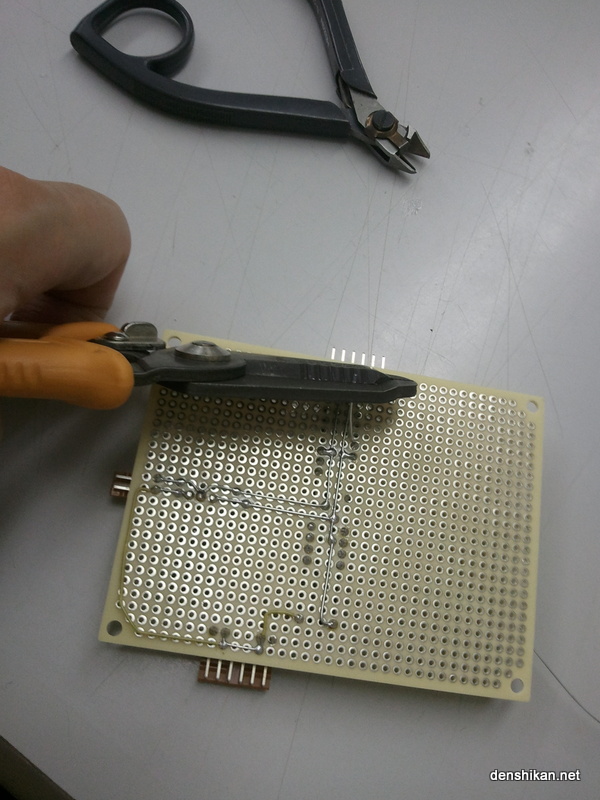
グラウンドと電源以外の配線は、すでにすずメッキ線で基板の裏面が覆い尽くされているはずですから、その隙間を通って部品の足(リード線)を直角に折り曲げて配線するのが楽で見栄えも良くなりますが、どうしても他と交差してしまう場合が多いでしょうから、その場合は電線を使って配線します。
ただし、電線に細い銅線が撚り合わせてある「より線」を使ってしまうと、被服のビニールをワイヤ・ストリッパでむいた後で撚って予備はんだして、はんだ付けしなくてはならず、手間と時間がかかりますし、細い銅線のヒゲが隣のピンに接触したりすると最悪の場合は部品が爆発したり燃えたりしますので、ヒゲの出ない被服単線(ラッピング電線)を使うのが便利です。
単線を基板の外の配線に使うと、動かした時に金属疲労で断線する可能性が高いので、基板の裏の配線には単線、基板の外の配線には「より線」を使うようにしましょう。
しかし、ラッピング電線は元々はラッピング配線と呼ばれる巻き付けて配線するための電線ですので、はんだ付けすることを想定しておらず、熱に弱かったり、はんだが付きにくかったりすることが多いので、あらかじめむいた銅線の部分にはんだ付けし、はんだでメッキする「予備はんだ」する必要があることが多いです。
予備はんだをしないで配線すると、見た目はつながっているのに電気が流れないことになったりして、動かない原因を探すのが困難になったり、他の部分の配線のために電線を少し引っ張ると抜けたりします。
潤工社という会社の「ジュンフロン線」と呼ばれる商品は熱に強く、しかも1メートル百円近くする高いジュンフロン線は通常のすずメッキではなく銀めっきされているため、はんだ付けしやすく予備はんだなしで配線できます。
ラッピング線(ジュンフロン線)
すずメッキ線

はんだ吸い取り器

7.機器配線
さきほども説明したように、基板外の配線は金属疲労による断線を防ぐために基本的に「より線」を使います。長さは両端1cm程度の余裕を持って配線します。あまりピンと張ってしまうと断線しやすく故障の原因となりますし、あまり長いと見た目や電気的な性能が悪くなります。
7.1 電線
配線に使う電線は先ほど説明したように「単線」と「より線」があり、一般的に「電線」と言ったら「ビニール被覆(ひふく)電線」を指します。

より線にも種類があり、細い線の数が多かったり少なかったり、銅線に酸素含有量の少ない純銅線などでは1メートルで数千円~数万円するものもあります。
一般的に単線では線の直径で、「より線」では線の断面積で選びます。もちろん銅線の太さによって流せる最大電流が変わります。また、被覆の材質や厚さで使える温度や電圧が変わります。この辺については話が長くなるので別紙を使って説明します。
7.2 コネクタ
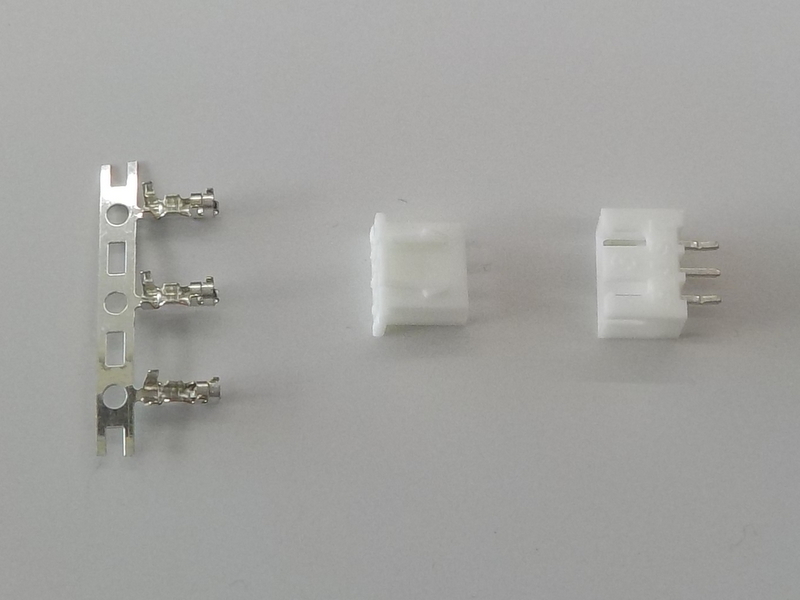
基板と電線を接続する場合に電線を直接はんだ付けしてしまうと基板の修正や配線の時に断線したり手間が増えたりしますので、コネクタと呼ばれる接続のための部品を使います。コネクタを使えば容易に外したり付けたりでき、基板の修正や修理交換に便利になります。
コネクタにも色々な種類や大きさがありますので、細かい説明は省きますが、基板と電線、あるいはユニットとユニットを接続するにはコネクタを使います。
パソコンと周辺機器を接続する際に使われるUSBなどもコネクタと信号について規定した標準規格の一種です。
7.3 端子台

コネクタに対して、電線をはんだ付けまたはネジ留めするための部品を端子台と言います。近年は電線をむいて差し込むだけで配線のできるワンタッチ端子台も多く使われるようになってきました。ただし端子台は基本的に着脱は困難ですが、ツーピース端子台を使えば電線をネジ止めする部分と基板にはんだ付けする部分を分離できるため、配線を丸ごと簡単に外して元に戻せるため、交換回数や着脱回数が多い場合にお勧めです。

端子台も種類が多いため、細かい説明は省きます。
7.4 圧着端子
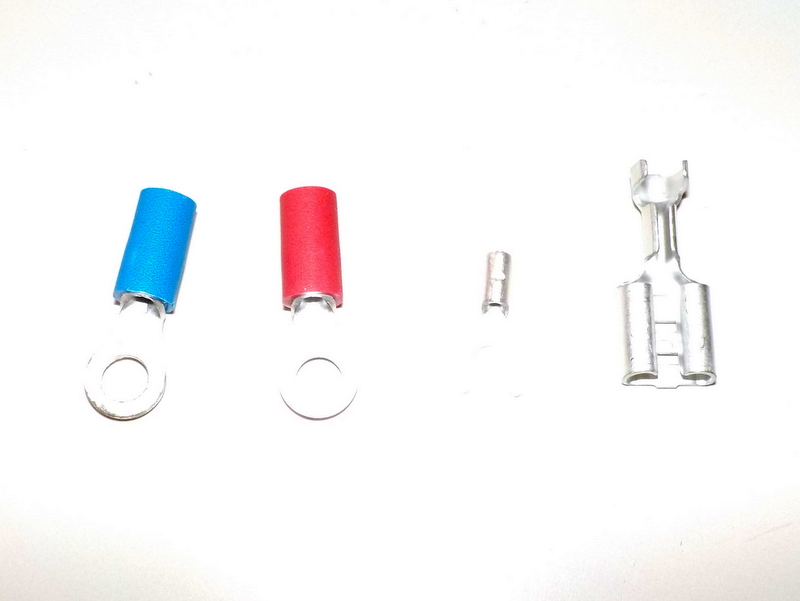
端子台に電線を配線する際に、電線を直接ネジ止めするのではなく、圧着端子と呼ばれる金属端子を圧着し、その圧着端子をネジ止めするようにすると信頼性が高く配線の変更が容易になります。
圧着端子の先端は、O型とY型(またはU型)の2通りありますが、Y型は簡単に着脱できるため、感電の危険がなくショートしても壊れない信号線に、O型はネジを完全に外さないと着脱できないため、簡単に外して欲しくない感電の危険のある配線やショートすると故障の原因になるような配線、安全装置の配線などに使います。
圧着端子の根元は使う電線の外径や芯径に合ったものを選びまずが、絶縁スリーブを付けないと感電やショートや断線の危険がありますので、絶縁スリーブ付き圧着端子を使うか、裸圧着端子を使う場合は必ず絶縁チューブを圧着前に通します。
圧着端子は写真7-4-1に示す圧着ペンチを使って圧着します。圧着ペンチの内側のダイス(型)には刻印があり、圧着した際のダイスの大きさが圧着端子に刻印されます(圧着端子に証拠が残る)ので間違えると信頼性が損なわれ、しかもすぐバレて恥ずかしい思いをしますので注意が必要です。
また、絶縁スリーブに印字できる装置も市販されており、信号名や電圧等を印字しておくと修理や改造の際にも間違いが少なくなり時間を短縮できます。

7.5 圧接
圧着は1本の電線に1本の端子を圧着ペンチで接続する方法ですが、圧接は複数の電線を一気に接続できる方法で、有名なのはパソコン内部の配線などに良く使われた「フラット・ケーブル」と呼ばれる複数の平らな電線に一気に複数の端子を接続する方法です。ちなみに芯線の本数の少ない電線を「リボン・ケーブル」、芯線の本数が多い電線を「フラット・ケーブル」と呼び分けたりしますが、重要なのはコネクタの規格に合った太さとピッチ(間隔)の電線を使わなくてはならないことです。
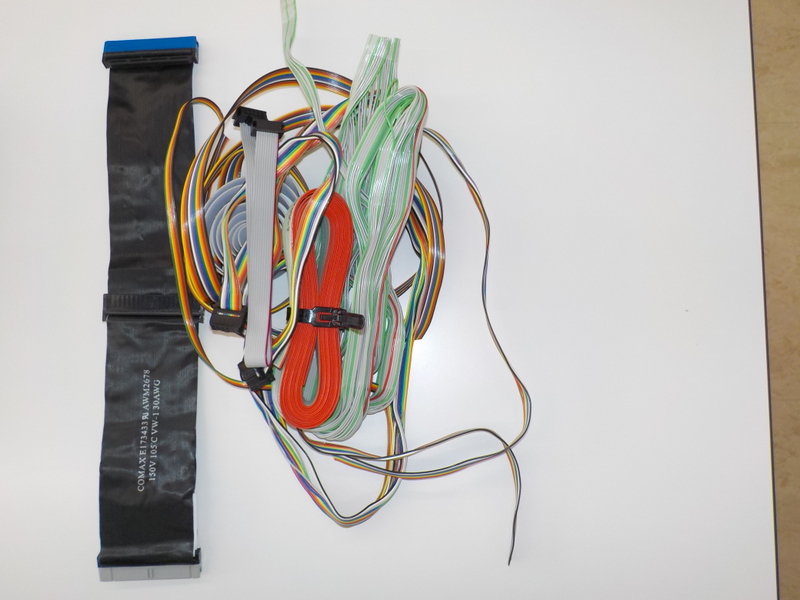
ちなみにフラット・ケーブルには、1本ごとに色が違うものや1番ピンだけ色が違うもの、全体が繋がっている(ブリッジ)ものと繋がってる部分とバラバラの部分が交互にある「すだれ」(風を通す日よけの簾)のタイプがあるので、電線をバラバラにしてはんだ付けしたり、狭い場所を通したりする場合は「すだれ」タイプのフラット・ケーブルを使うと配線が楽になります。

ワイヤーストリッパー(電線をむく道具)

圧着工具(電線に圧着端子を付ける工具)

8.プログラム
プログラムはコンピュータに命令する際に処理の手順をコンピュータの命令語で表したものです。コンピュータの命令語は機種によって違うため、それを統一した形で書けるようにするのが一般的で、その方法として各種プログラム言語、ラダー図などがあります。
8.1 プログラム・コントローラ
プログラム・コントローラは機械のコントローラをリレー回路から置き換える目的で作られたもので、プログラム・ロジック・コントローラあるいはシーケンサと呼ばれます。
プログラム・コントローラの内部にはマイコンが使われていて、そこには予めマイコンのプログラムが書き込まれており、簡単な命令を組み合わせたプログラムで動かすことができるようになっています。
プログラム・コントローラのプログラムは以前はニーモニックと呼ばれる略号を使って作らなければならなかったのですが、近年ではパソコンでリレーの部品の要素をドラッグ&ドロップで配置し、それをコンパイル(コンピュータによる編集)し、ダウンロードすることによって、簡単に使えるようになりました。
8.1.1 タイムチャート
プログラム・コントローラやリレー回路で、信号が時間でどのように変化するかを図にしたものです。一般的には縦軸に信号名、横軸に時間を書き、信号の変化を線で描きます。
8.1.2 ラダー図
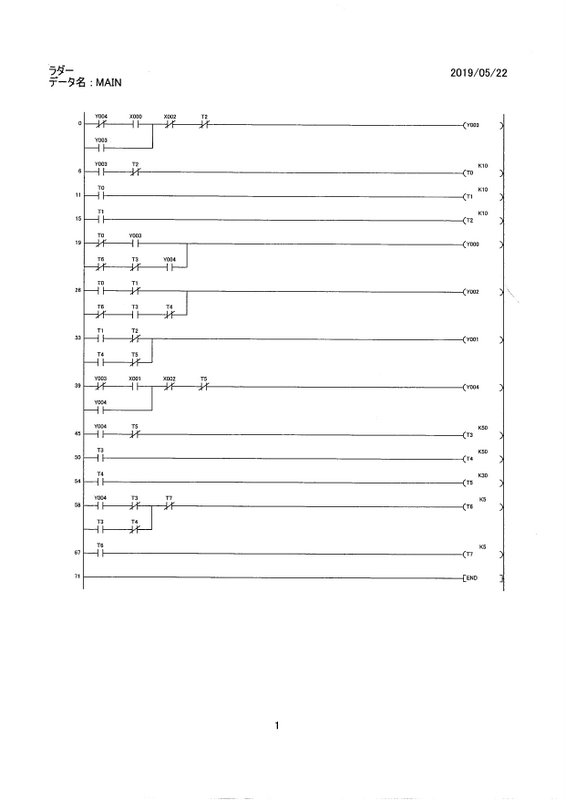
タイムチャートにより設計したタイミングをリレー回路の基本であるAND,OR,NOTに置き換え、リレー回路のように描いた図で、以前はこのラダー図からニーモニックへの変換は人手によって行われ、その結果を人手によってプログラム・コントローラに入力しなくてはなりませんでしたが、近年では変換と入力がパソコンとUSB接続されたプログラム・コントローラとの間で自動的に行われるのが主流です。
ラダー図において、コンデンサの図記号のような平行線が作動するとオンになる「A接点」、それに斜線を加えたものが作動するとオフになる「B接点」で、直列に接続すればAND、並列に接続すればORになります。
そうしてAND,OR,NOTを組み合わせて、最後(右端)にリレー・コイルあるいはタイマ・コイルをむ描き、その条件で対応する出力がオンになります。
8.1.3 ダウンロード
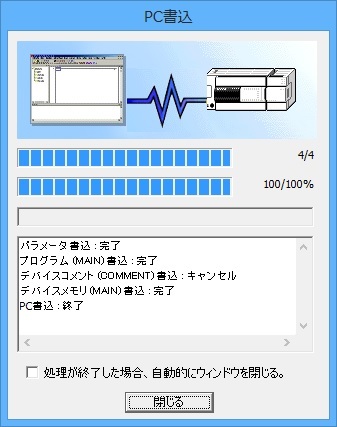
プログラムをホスト・コンピュータ(この場合はパソコン)からターゲット(この場合はプログラム・コントローラ)に書き込むことを「ダウンロード」と呼び、その逆を「アップロード」と呼びます。
インターネットでは、サーバ・コンピュータ(インターネット側)から自分のコンピュータ(端末あるいはクライアントと呼びます)にデータなどを転送するのを「ダウンロード」、その逆を「アップロード」と呼びます。
日本語で言うと、「下賜」と「献上」ですかね…
8.2 マイコン
超小型コンピュータすなわちマイクロ・コンピュータを短縮してこう呼びます。超小型ですが、数十年前のスーパー・コンピュータを超える性能を持ったものもあり、比較的低機能なものは家電製品などに、高機能なものはパソコンやスマートホン(スマホ)、ゲーム機などに使われています。
コンピュータは、自分自身の命令語の「機械語」あるいは「バイナリ・コード」しか理解できません。しかし、機械語は2進数(けた数が多くなるので便宜上16進数が多く使われます)なので、人間には理解しにくく、機械語でプログラムを作るのは困難を極めます(それでも大昔はパソコンがなかったので人間が機械語でプログラムを作っていました)。
そこで、人間に理解しやすいプログラム言語を考え、それをコンピュータに翻訳させることにより、簡単にプログラムを作れるようになりました。また、これはコンピュータの機種ごとに違う機械語を覚える必要がなく、同じプログラムをさまざまなコンピュータで実行できるという利点もあります。
便利なプログラム言語ですが、コンピュータの利用目的によって必要な処理の内容が違うため、利用目的によって多くのプログラム言語が生まれてしまいました。
大昔には、シミュレーションなどの科学技術計算を得意とするFORTRAN、経理や請求書の発行など事務処理を得意とするCOBOL、銀行や金融などの金利計算や入出金管理を得意とするPL/I、教育用の簡単なBASIC、あまり普及しなかったAda,PASCALなど、それぞれの特徴を持ったプログラム言語が数多くありました。
その中で異彩を放っていたのが、電話交換機用に作られたC言語で、当時のマイクロ・コンピュータは性能も低く、メモリーも少なかったため、機能が少なくても小さく軽い機械語プログラムを作れるC言語しか使えなかったという事情から、その後、パソコンでもC言語が一般的になり、中型のワークステーションなどでもC言語が使われるようになり、近年ではC言語の流れをくむJavaなどのプログラム言語もスマホのアプリやWebアプリなどで使われるようになりました。
8.2.1 C言語
先ほど説明したように、C言語は元々は電話交換機の制御用に考えられたプログラム言語ですが、制御に使いやすく、メモリーも少なくて済み、無駄な処理も少なかったため、低性能のコンピュータすなわちマイコンで主流になり、制御向きであることからマイコンによる機械の制御にも適していたため、現在ではマイコンのプログラムはC言語以外の選択肢はないと言っても過言でないほど良く使われます。
C言語の言語上の特徴を簡単に言えば、メモリーを節約するためにデータのサイズを自分で決められる(決めなくてはならない)こと、計算結果によって処理の流れを変える条件分岐を見やすく少ない処理時間で実行できること、制御プログラムで良く使われ、マイコンの機械語にも必ず存在するインクリメント(+1する)またはデクリメント(-1する)が使える、制御プログラムで必要になることが多い「割り込み処理」を手軽に書けるなどの特徴があります。
プログラムの見た目の特徴は、行の最後がセミコロン「;」で終わることです。これにより、行が長くなっても見やすいように複数行に分割して書くことが可能です。ただし、セミコロンを忘れると行は続くと解釈され、次の行と続いていることになってしまうため、意味不明のエラー・メッセージ(しかも英語で)に悩まされます。まあ逆に意味不明のエラー・メッセージが表示された時はセミコロンを付け忘れていないか最初に確認するようにしましょう。
8.2.2 命令語
C言語における命令語は、非常に少なく、条件分岐のif,swith、繰り返し命令のfor,while,doなどで、他の機能は計算(演算といいます)をするための演算子、特定の処理をするための関数で実現されているため、覚えるのは少ない命令語だけで済みます。ただし演算子はキーボード上の普段は使わない記号を多用するため最初は戸惑うかも知れません。
8.2.3 基本構造
前に説明したようにC言語の行はセミコロンで終わります。また、ひとつの処理ブロックを中かっこ(あるいは波かっこ)と呼ばれる「{」と「}」でくくり、人間には見やすいのですが、かっこの数が合わないと、これまた意味不明のエラー・メッセージに悩まされますので、通常は前(左側)に空白(スペース)を入れ、段落を付けます。
また、/*で始まり*/で終わる部分は「コメント」と呼び、処理の流れに関係なく機械語にも翻訳されない(無視される)ため、プログラムの説明や作成日、作成者、バージョンなどの情報を書き込みます。
//で始まる部分は1行コメントと呼び、そこから改行までをコメントとして無視しますので、その行の説明などを書きます。
コメントは書いても無視されるため、書かなくてもプログラムを作ることは可能ですが、後日、自分でプログラムを書き換えたり直したりする場合のため、あるいは他人が見てもプログラムの意図が理解できるように、積極的に書きましょう。
コメントの少ないプログラムは恥になります。ただし、不必要に長いコメントやプログラムと関係ないコメントはプログラムを余計に理解しにくくしたり、プログラムのサイズが大きくなって見にくくなったりコンパイルに時間がかかるようになったりしますので慎みましょう。
8.2.4 条件分岐
コンピュータと電卓の一番の違いは処理を自動化できるかどうかです(プログラム電卓も存在しますが)。処理を自動化するためには、条件によって処理の流れを変える必要があります。
最近流行の人工知能なども条件分岐の組み合わせでできています。条件は計算結果であったり、データそのもの(性別や年齢や資産など)であったり、データの状況(将棋の盤面や画像の形状)であったりと色々ですが、とにかく条件を上手に組み合わせると例外処理を含めて処理を自動化できます。
C言語においては、ifとswitchの2つの分岐命令がありますが、ifはyesかnoかで分岐するため(性別やボタンが押されたかどうかなど)2通りの分岐に、switchは値によって分岐するため3通り以上の分岐(1を選んだら入金、 2を選んだら出金、3を選んだら残高照会、4を選んだら振込、5を選んだら振替、9を選んだら他の手続のように)に使われます。
8.2.5 繰り返し
コンピュータの得意な処理に繰り返し処理があります。コンピュータは高速で繰り返し処理をすることにより、大量のデータを間違いなく集計したり、天気を予想したり、将棋の次の手を決めたりします。また、制御ではエレベータや電車などを安全に正確に運転したり、複雑な操作手順をボタンを押すだけで自動的に繰り返し処理したりします。
C言語においては、繰り返し命令はfor,while,doがあります。forは繰り返す回数が予め決まっている場合に、whileは繰り返す条件が決まっている場合に、doは繰り返しを止める条件が決まっている場合に良く使われます。
8.2.6 演算
コンピュータの計算は、数値計算だけではなく、論理演算(AND,OR,NOT,XOR,Ex-ORなど)もあるため、「計算」とは呼ばず「演算」と呼びます。
C言語をはじめ、ほとんどのプログラム言語では演算を数式で表しますが、その数式の中で演算に使われる記号が演算子です。
C言語では、表8-1のような演算子がありますが、他の言語にくらべて変な記号を使った演算子が多いため、最初は戸惑うかも知れませんが、以前にくらべてExcelなどの表計算ソフトの普及により、抵抗も少なくなっているのではないでしょうか。
また、演算子には表8-2のような優先順位があります。一般的にも乗除算は加減算に優先するなどの知識があるでしょうから、このこと自体は理解できると思いますが、プロでも優先順位を全部暗記するのは困難で、優先順位に自信がなければ、優先する演算をかっこ()でくくって書くのが無難です。優秀なコンパイラ(C言語のプログラムを機械語に翻訳するソフト)は自動的に無駄なかっこを取り除いてくれますし、さらに優秀なコンパイラは無駄な演算を修正してくれたりします。
a*2+b*2+c*2 → (a+b+c)*2
8.2.7 変数
C言語をはじめプログラム言語ではデータや計算結果はメモリーに記憶されます。これを値が変わる数ということで「変数」variableと呼びますが、大昔のマイコンのようにメモリーが少ない場合は、無駄に使うとすぐに足りなくなってしまうばかりでなく、変数のサイズが大きいと処理に時間がかかったりします。初期のマイコンは同時に処理できるのは4ビットだったので、たとえば16ビットの数値を足し算するには演算を4回しなければならず、16ビットの数値を掛け算するには演算を128回しなければならなかったり、ましてや64ビットの関数演算などをしようものなら気の遠くなるような回数の演算をしなければならなくなっていました。
実際に大昔の電卓などは平方根の演算をすると結果が出るまで十数秒かかったりしたものでした。
しかし、現在のパソコンに使われているCPUの演算回路は64ビットの演算を1回でできるだけでなく、複数の演算を同時に処理できる(マルチコア)ようになり、演算が格段に速くなりました。しかも、大昔はマイコンに可能な演算は加減算と倍と半分だけで、乗除算や関数演算は、この命令を組み合わせて気の遠くなるような回数の演算をしなければなりませんでしたが、16ビットCPUからは乗除算回路の内蔵が一般的になり、乗除算も1回の演算で済むようになり、徐々に同時に複数の演算が可能なパイプライン処理が可能になり、近年では複数の処理が同時に可能なマルチコアが実現し、人工知能のような複雑な処理も可能になりました。
かなり前からチェスでは人間はコンピュータに勝てなくなっていましたが、近年は将棋でも人間はコンピュータに勝てなくなりましたし、近い将来、こういった単純な(難しいが)ゲームだけでなく、弁護士や会計士もコンピュータに勝てなくなる時代や、すでに一部の業界では人間がロボットに勝てなくなっています。
8.2.8 データ型
先ほどC言語では変数のサイズを自分で決めないとならないと説明しましたが、それがデータの型です。C言語においては表8-3に示すような型があり、型によって必要なメモリーと処理時間が変わりますので、不必要にサイズの大きな型にしないように注意する必要がありますが、逆に必要なサイズが足りなくなると予期しない結果をもたらすことになるので(パソコンソフトやスマホのフリーズは変数の型やプログラムの条件分岐の誤りから起こる場合が多い)更に注意が必要です。
8.3 書き込み

書いたプログラムはコンパイラにより機械語に翻訳され、ターゲットとなるマイコンに書き込まれます(ダウンロード)。
書き込みの方法はマイコンによって違い、大昔はROMライタと呼ばれる装置を使ってROMと呼ばれる読み出し専用メモリーに書き込み、書き込まれたROMをターゲットのマイコン基板のICソケットに差し込み、プログラムを書き換える時はROMをROMイレーサと呼ばれる装置で紫外線を約20分間照射してROMのプログラムを消し、再度ROMライタで書き込み…以下同文、と、プログラムを1回間違えると次に試せるまでにROMが複数あっても数分、ROMが1個しかないと30分ほど必要で、しかもROMの書き換え保証回数が100回などと、とんでもなく手間のかかるものでした。
その後、EEPROMやフラッシュメモリーが普及し、ROMをICソケットから抜き差しすることなく書き込み(オンボード書き込みと呼ぶ)できるようになり、更に回路に組み込んだまま書き込み(インサーキット書き込みと呼ぶ)できるようになり、書き込みの利便性は格段に良くなりましたが、専用の書き込み器が必要なものが多く、最近ではパソコンのUSBポートとUSBケーブルで直結するだけで書き込みができるものもありますが、まだまだ普及段階です。
EEPROMを搭載したマイコンでは、プログラムの書き込み保証回数は1000回程度、フラッシュメモリーを搭載したマイコンでは10万回程度と、ほとんど書き換え可能回数を気にしなくても良くなりました。
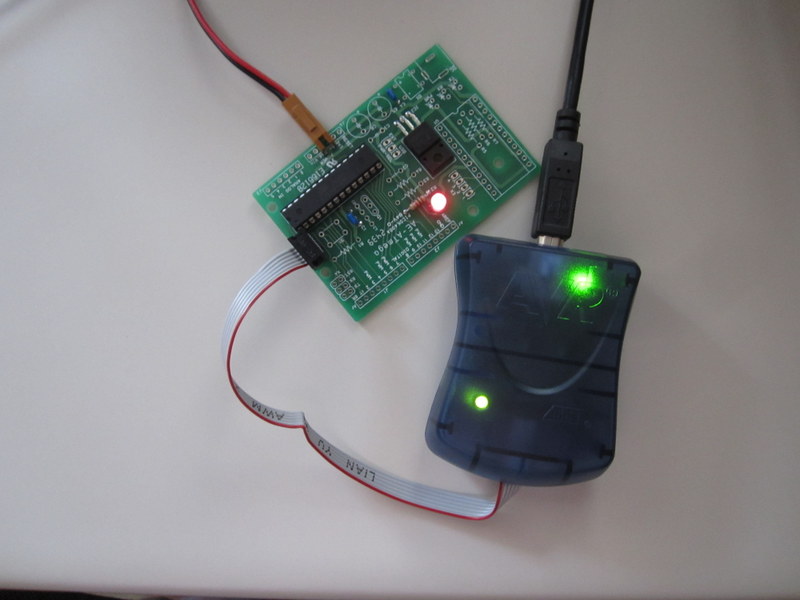
8.3.1 書き込み器
マイコンのプログラムを書き込むためには、写真8-1のような専用の装置を必要としますが、数万円~数十万円したROMライタに対して、数千円~せいぜい1万円ちょっとと格段に安く済むようになりました。USBで書き込めるものでは数百円のUSBケーブルで済みますので、新規にマイコンを使った機器を開発するのに必要な費用は格段に安くなっています。
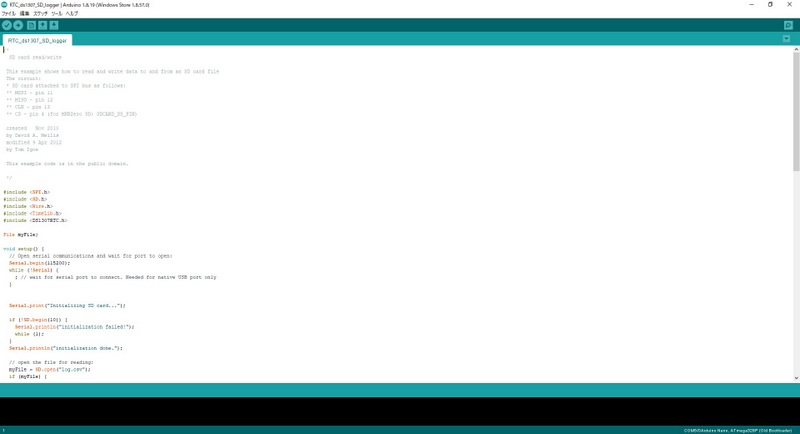
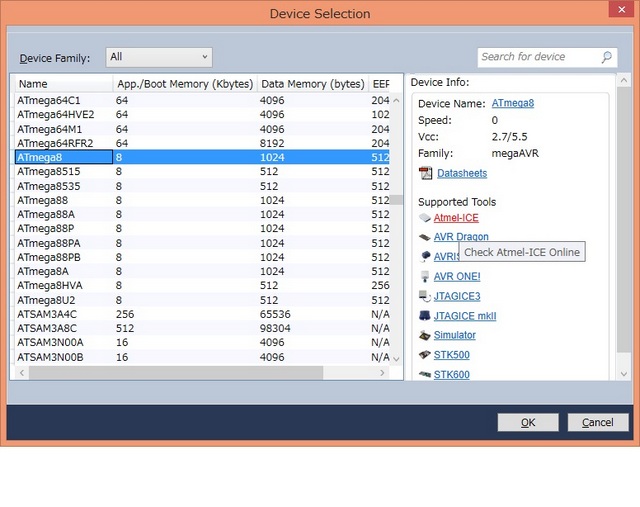
8.3.2 書き込みソフト
マイコンにプログラムを書き込むために必要なパソコン・ソフトはマイコンのメーカーから無料でダウンロードできるものが多くなっています。
書き込みソフトだけでなく、マイコンのプログラムを書くためのエディタも大昔は数千円~数万円、書いたプログラムを機械語に翻訳するコンパイラも数万円~数十万円しましたが、近年ではマイコンのメーカーによって無料でダウンロードできるものも多くなりましたので、マイコンの機種を適切に選べば、パソコンさえあれば(ただしWindowsパソコンが必要)マイコンのプログラム開発には、ほとんど初期投資は必要なくなっています。
ちなみに、エディタあるいは統合開発ソフトで書かれたC言語などのプログラムをソースプログラムあるいはソースコードと呼び、コンパイラで機械語に翻訳されたプログラムをオブジェクトプログラムあるいはバイナリコードと呼びます。
バイナリコードの拡張子はHEXが一般的ですので、「HEXファイル」あるいは「ヘキサファイル」と呼ばれることもあります。
マイコン開発風景
9.最後に
ここまで、メカトロニクスの実現に必要最低限の知識について説明しましたが、電子回路技術もコンピュータ技術も奥が深く、一人前になるのも相当量の努力が必要かと思います。
しかし、これらの技術で一人前になれば、自分の仕事が人工知能に置き換えられることもなければロボットに置き換えられることもないでしょう。
また、給料も他の職種よりは高いでしょうし、就職や転職も容易でしょうし、あまり出世は望めないかも知れませんが、もしかすると将来独立してITビジネスで大成功する可能性もあるかも知れません。
現に、ここで学ぶC言語のテクニックはITビジネスに必要なJavaやPerlやPhysonの元になっているプログラム言語ですし、マイコンによる制御はロボットの基本ですし、世の中のほとんどの機械は電子回路なしでは動かないのですから。
でも、私もこの歳になって思うのは、ビジネスとしての成功の可否は、技術あるいは技能のほかに、ビジネス・センスあるいは経営戦略で決まるような気がするのです。
私の授業で、そうしたビジネスの話が時々出てくるのは、そうした理由からです。
どうか皆さんにも、技術や技能だけでなく他の知識や経験を活かして、幸せな人生を送られることを願ってやみません。
ありがとうございました。
最後に、こうした文章を書く機会を与えてくださった関係者の方々と、最後まで私の稚拙な文章にお付き合いくださった皆さんに感謝して締めくくりとさせていただきます。
著作権者:高見 豊
著者ページへのリンク
メカトロニクス百科 https://mechatro.net/
電子工学百科 https://denshikan.com/
Copyright © 2020 by Yutaka Takami all right reserved